I. Mục đích:
Mức độ 1: Thu thập dữ liệu hiện trạng mô hình.
Mức độ 2: Số hóa dữ liệu công trình. Cải tạo/ mở rộng/ đấu nối hệ thống.
Mức độ 3: Kiểm tra va chạm với mô hình thiết kế mới.
Giới thiệu
Máy quét laser 3D Trimble X7:

Máy có kết cấu tinh gọn, vận hành đơn giản. Kết hợp hệ thống servo và gương quét, tích hợp chụp ảnh và công nghệ ghép dữ liệu tự động. Giới chuyên môn đánh giá, thiết kế này sở hữu hai ưu điểm, là tính năng tự động hiệu chỉnh thiết bị để duy trì độ chính xác; tự động cân bằng ở độ chính xác cấp độ khảo sát, tối ưu hoá thời gian quét. Từ đó, giúp chuyên gia, kỹ sư công trình không cần mang thiết bị kiểm định hằng năm, tiết kiệm chi phí.
Ngoài ra, dữ liệu Point Cloud thu thập từ máy với độ chính xác cao đến từng milimet có thể ứng dụng trong nhiều mảng như thành lập bản đồ, xây dựng mô hình thông tin xây dựng (BIM), dựng bản vẽ hiện trạng 2D, mô hình 3D và quy hoạch kiến trúc. Dữ liệu quét cũng được thu thập đầy đủ trước khi kỹ sư rời hiện trường, đạt tốc độ quét 500.000 điểm mỗi giây và dễ dàng kiểm tra trực quan 2D, 3D trên bộ điều khiển. Đồng thời chia sẻ thông tin qua các công cụ dữ liệu đám mây của Trimble hoặc bên thứ ba.
Thông thường dữ liệu quét được thu thập ở hiện trường và xử lý tại văn phòng. Với việc tích hợp tính năng tự động ghép dữ liệu (Automatic Registration), thiết bị giúp kỹ sư thao tác hoàn thiện tại hiện trường. “Nền tảng này dựa trên công nghệ Trimble Registration Assist, kết hợp giữa hệ thống quán tính (IMU), hệ thống tự động cân bằng (Automatic Self-Leveling) với thuật toán xử lý của phần mềm hiện trường Trimble Perspective”
Tính năng của Trimble X7 giúp tiết kiệm thời gian xử lý nội nghiệp ở các công đoạn tiếp theo, như dựng mô hình hiện trạng 3D, số hóa dữ liệu hoặc phân tích dữ liệu quét. Đồng thời tăng sự kết nối giữa bộ phận khảo sát với nội nghiệp.
Công dụng:
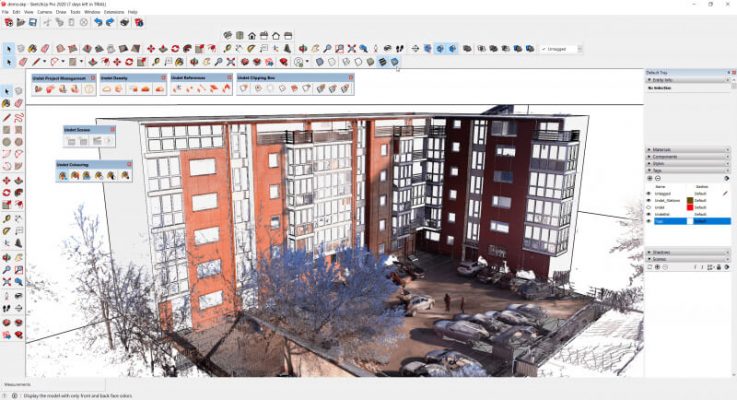
Dùng để đo vẽ hiện trạng, khảo sát địa hình phục vụ thiết kế cải tạo công trình cao tầng, cầu đường. Hình bên dưới là kết quả sau khi scan về. Mô hình này gọi là Point Cloud dùng cho các việc tiếp theo như: dựng mô hình hiện trạng 3D, số hóa dữ liệu, phân tích dữ liệu quét để đo khoảng cách, tính diện tích, thể tích, phát hiện vết nứt, sụt lún, rò rỉ nước, … Và dùng point cloud để xây dựng mô hình hoàn công phục vụ công tác vận hành và bảo trì.
Sản phẩm đầu ra